|
|
Радары ПРО.
Разработка радиолокационных средств ПРО была начата еще в конце 40-х годов, а 3
февраля 1956г. вышло постановление ЦК КПСС и Совета Министров СССР за № 170-101 «О
противоракетной обороне». К этому времени в Радиотехнической лаборатории АН СССР
(РАЛАН, переименованном затем в Радиотехнический институт - РТИ) под руководством
академика А. Минца разрабатывался проект «зональной» системы ПРО, построенной по
двуступенчатой схеме, т.е. с применением двух типов РЛС - точного наведения и сопро-
вождения - ЦСС-30 (Центральная станция сопровождения) дециметового диапазона с антен-
ной в виде большого механически перемещаемого зеркала диаметром около 30м. и ЦСО-П
(Центральная станция обнаружения - предварительная) метрового диапазона. Однако, в
связи с отказом в 1960г. от двухступенчатого построения системы ПРО, работы по РЛС
ЦСС-30 были прекращены. Тем не менее, станция ЦСО-П была построена и испытана на
Балхашском полигоне. В дальнейшем на ее базе были созданы РЛС системы ПРН «Днестр» и
последующие ее модификации. В 1959-60г. в институте разрабатывается второй вариант
системы ПРО на основе одной РЛС, объединявшей в себе задачи обнаружения и сопровож-
дения, работавшей в дециметровом диапазоне. В 1963–64г. на Балхашском полигоне эта
станция была сооружена и началась ее наладка. РЛС получила шифр «ЦСО-С» (Центральная
станция обнаружения и сопровождения). РЛС ЦСО-С привлекалась к проведению испыта-
тельных работ на полигоне (в том числе испытаниям средств преодоления ПРО).
Одновременно разрабатывался альтернативный вариант радиотехнических средств сис-
темы ПРО также в составе двух РЛС - дальнего обнаружения и точного. С 1956г. в ОКБ
завода №37 (в дальнейшем коллектив неоднократно переименовывался в НИИ-108, НИИ-37,
Научно-исследовательский радиотехнический институт - НИРТИ, НИИ дальней радиосвязи
- НИИДАР) под руководством главного конструктора В.Сосульникова. велась разработка
РЛС дальнего обнаружения получившей название «Дунай-2». В СКБ-30 (в составе КБ-1)
под руководством Г.Кисунько создавалась РЛС точного наведения использующих метод
трех дальностей и РЛС управления противоракетой. Именно этот проект и был положен в
основу создания опытной (полигонной) системы ПРО получившей наименование система «А».
Для ее строительства у оз.Балхаш был создан полигон «А» в дальнейшем ставший НИИП-10
(Приозерск).
В состав радиотехнических средств системы «А» входили: станция обнаружения бал-
листических ракет «Дунай-2, три РЛС точного наведения и РЛС визирования противоракет,
совмещенная со станцией передачи команд.
РЛС «Дунай-2» предназначалсь для обнаружения БР, построения их траекторий и выда-
чи данных целеуказания радиолокаторам точного наведения. Она представляла собой РЛС
непрерывного излучения в метровом диапазона волн, и определяла дальность и две угло-
вые координаты цели. В состав станции входили антенные системы, передающее устрой-
ство, приемо-индикаторное устройство и устройство автоматического сопровождения цели
и выдачи ее координат. Передающая и приемная позиция станции со своими антенными
системами были разнесены на местности на расстояние одного километра. Передающая ан-
тенная система была выполнена в виде парабо-
лического цилиндра, облучаемого с помощью
двух щелевых волноводных облучателей. Габа-
ритные размеры передающей антенной системы
– 8 на 150м. Передающая антенна формировала
в пространстве две диаграммы направленности
размером 0,6 град на 16 град. Приемная ан-
тенная система состояла из двух ярусов ан-
тенн, аналогичных передающей антенной сис-
теме и двух пар волноводных щелевых облуча-
телей. Общие габаритные размеры приемной
антенной системы – 20 на 150м. Передающее
устройство состояло из двух передатчиков,
каждый из которых излучал мощность 40кВт. |  |
Радиолокатор точного наведения обнаруживал и сопровождал цель по данным целеука-
зания, вырабатываемым центральной вычислительной станцией. По их данным уточнялась
траектория цели и производились предстартовые расчеты. Радиолокаторы точного наве-
дения получали также целеуказания по противоракете и сопровождали ее по дальности.
На этапе точного наведения по трем дальнос-
тям до цели и трем дальностям до противо-
ракеты, измеряемым радиолокатором точного
наведения, вырабатывались команды управле-
ния противоракетой, а в конце наведения –
команда на подрыв боевой части. Параболи-
ческая антенна имела диаметр около 15 м.
обеспечивавший остронаправленный луч шири-
ной 0,7 на 0,7 град. Все управление рабо-
той радиолокатора точного наведения было
автоматизировано и осуществлялось дистан-
ционно по радиорелейным линиям от централь-
ной вычислительной станции при минимальном
участии операторов. |  |
Радиолокационная станция визирования противоракеты (гл. конструктор С.Рабинович).
предназначалась для автоматического захвата противоракеты и сопровождения ее (по
сигналам бортового приемоответчика) с момента сброса ускорителя до момента подрыва
боевой части. Она выдавала на центральную вычислительную станцию текущие координаты
противоракеты (две угловых координаты и дальность). Станция представляла собой им-
пульсную РЛС, работающую в дециметровом диапазоне волн. Диапазон измерения дальности
до противоракеты – 1-60км. Максимальная ошибка измерения дальности – 30-50м. Макси-
мальная ошибка измерения угловых координат – 10 мин. В состав РЛС визирования проти-
воракеты входили два (для резервирования)
одинаковых радиолокатора, центральный пульт
управления и автоматическая контрольная
станция. Антенная система была выполнена в
виде трех параболических зеркал, смонтиро-
ванных на общем поворотном механизме и вклю-
чала в себя антенну канала захвата, антенну
точного сопровождения и антенну компенсации,
совмещенную с антенной станции передачи ко-
манд. Диаметры параболических зеркал антенн
соответственно были равны 1м. 2,5м. и 2,5м.
Управление станцией было полностью автома-
тизировано и осуществлялось дистанционно по
командам и сигналам, поступающим от цент-
ральной вычислительной станции по радиоре-
лейным линиям. | 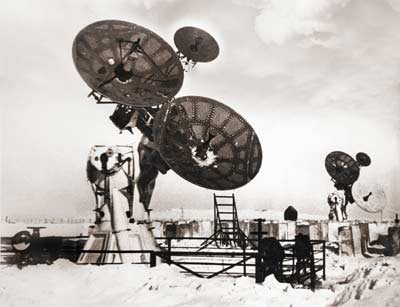 |
Станция передачи команд (гл. конструктор Г.Кисунько) предназначалась для преобра-
зования, формирования и передачи команд управления противоракеты и команды подрыва
боевой части. На вход станции передачи команд с центральной вычислительной станции,
через систему передачи данных, поступали команды управления в виде последователь-
ного цифрового кода двоичной системы счисления. Управление станцией осуществлялось
автоматически по командам от центральной вычислительной станции.
Вся система работала следующим образом. Станция обнаружения БР осуществляла оп-
ределяла текущие координаты цели и выдавала их на центральную вычислительную станцию
системы. Которая осуществляла целеуказания для трех радиолокаторов точного наведения
и рассчитывала упрежденные координаты цели. Все три радиолокатора точного наведения
осуществляли захват цели на автоматическое сопровождение и выдавали уточненные дан-
ные о ее координатах на центральную вычислительную станцию системы. По уточненным
координатам цели центральная вычислительная станция проверяла попадание точки паде-
ния цели в зону обороны стартовой позиции, определяла параметры траектории вывода
противоракеты на траекторию цели и выдавала команду на пуск противоракеты. После
старта противоракета захватывалась на автоматическое сопровождение радиолокационной
станцией визирования противоракеты, которая определяла и выдавала на центральную вы-
числительную станцию текущие координаты противоракеты. Эти координаты использовались
для формирования команд управления противоракетой на этапе вывода и для выработки
целеуказаний по противоракете радиолокаторам точного наведения. После вывода проти-
воракеты на траекторию, близкую к траектории цели, начинался этап точного наведения.
Он характеризовался тем, что команды управления противоракетой формировались цент-
ральной вычислительной станцией по данным о дальностях цели и противоракеты, измеря-
емой тремя радиолокаторами точного наведения. В расчетный момент времени центральная
вычислительная станция выдавала команду подрыва боевой части противоракеты. Команды
управления противоракетой и команда подрыва передавались на противоракету станцией
передачи команд. | В 1960г. вышло Постановление ЦК
КПСС и СМ СССР о создании системы
ПРО А-35. В связи с отказом от пос-
троения системы ПРО по двухступен-
чатой схеме для нее был разраборана
новая РЛС «Дунай-3» (гл.конструктор
В. Сосульников) в которой совмеща-
лись функции дальнего и точного на-
ведения. Станция была сооружена
около п.Кубинка в Одинцовском р-не
Московской обл. в первой половине
60-х годов. В опытной эксплуатации
с 1968г.
В это же время в НИИДАР для
модернизированной системы ПРО А-35М
началась разработка РЛС «Дунай-3У»
(гл. конструктор А.Мусатов) и модер-
низация «Дунай-3» (получивший обоз-
|
начение «Дунай-3М). В мае 1978г. система А-35М с РЛС «Дунай-3М» и «Дунай-3У» постав-
лена на боевое дежурство в составе отдельного корпуса ПРО. «Дунай-3У» прикрывает
западное и восточное направления, а «Дунай-3М» северное и южное.
«Дунай-3М» состояла из приемного и передающего комплексов, разнесенных на рас-
стояние 2,5км. Передающий комплекс включал в себя две секторные передающие станции
совмещенные в одном здании, с находившемся в нем технологическим оборудованием, и
направленные в строго противоположные стороны (север и юг). Геометрические размеры
антенн (ФАР): длина 200м. высота около 30м. Мощность передатчиков каждой из станций
около 3 МВт. Дальность действия «Дунай-3М» составляла 2500км. Приемный комплекс
представлял собой 2 совмещенных ФАР, выполненных в виде отдельного сооружения (100 Х
100м.), расположенных в параллельной плоскости с антеннами передающего комплекса, и
здание с аппаратурой обработки принятого сигнала. В этом же здании располагался
вычислительный центр и командный пункт системы А-35. После ввода в эксплуатацию
радиотехнического узла с РЛС «Дунай-3У» сюда информация поступала от обеих станций.
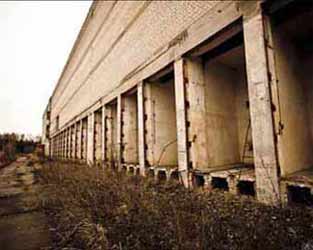
  8 мая 1988г. на узле произошел пожар, в результате которого командный центр пе-
редающей станций выгорел. Для имитации работы комплекса передающая часть РЛС продол-
жала некоторое время работать, но восстанавливать ее не стали, так как вводилась в
строй новая система ПРО А-135. Принимающую часть комплекса с вычислительным центром
решено было использовать в составе с другими комплексами системы ПРО. Антенны пере-
дающей части постепенно разобрали, а наиболее ценное оборудование вывезли, остальное
было растащено местными «стартелями». Вот что сейчас осталось от этой РЛС.
8 мая 1988г. на узле произошел пожар, в результате которого командный центр пе-
редающей станций выгорел. Для имитации работы комплекса передающая часть РЛС продол-
жала некоторое время работать, но восстанавливать ее не стали, так как вводилась в
строй новая система ПРО А-135. Принимающую часть комплекса с вычислительным центром
решено было использовать в составе с другими комплексами системы ПРО. Антенны пере-
дающей части постепенно разобрали, а наиболее ценное оборудование вывезли, остальное
было растащено местными «стартелями». Вот что сейчас осталось от этой РЛС.
   На полигоне «А» (Сары-Шаган) был развернут полигонный вариант РЛС «Дунай-3У» -
«Дунай-3УП» (обозначение НАТО «Top Roost»), представлявший собой половину базовой
станции. РЛС вошла в состав полигонного комплекса ПРО «Алдан» в качестве РЛС даль-
него обнаружения целей. По результатам испытаний РЛС «Дунай-3УП» было принято реше-
ние о строительстве РЛС «Дунай-3У» вблизи г.Чехов на юге Московской обл. (Чехов-7).
В октябре 1973г. передатчик станции впервые заработал на излучение. В июле 1974г.
начались заводские испытания, а в 1975г. РЛС «Дунай-3У» была состыкована с объектами
системы ПРО А-35. В 1978г. РЛС введена в строй вместе с принятием на вооружение сис-
темы А-35М.
При разработке и создании станции был учтён опыт конструирования и эксплуатации
станции «Дунай-3М», а также применены новые достижения в области электроники. Это
позволило повысить дальность и точность действия станции, надежность её работы. Кон-
структивно комплекс схож с системой «Дунай-3М». Внешними различиями стали измененная
конструкция антенн (иная конструкция формирующей линзы ФАР) и их расположение (в от-
личие от совмещённых и направленных строго противоположно антенн «Дунай-3М», на
новой станции они разнесены примерно на 150м. и повернуты на несколько градусов).
Новая и более компактная аппаратура и оборудование позволили существенно сократить
необходимые объемы технологических помещений. Управление РЛС и обработка информации
осуществляется автоматически высокопроизводительной вычислительной системой с трой-
ным резервированием. РЛС обнаруживает с высокой вероятностью 90% всех составляющих
сложных баллистических целей на расстоянии не менее 2500км. РЛС может сопровождать
одновременно не менее 30 сложных баллистических целей. В 1984г. после поведенной
модернизации РЛС «Дунай-3У» могла обнаруживать ракеты «Першинг-2» через 2-3 минуты
после их старта. Некоторое время РЛС «Дунай-3У» работала в составе системы ПРО А-135
с РЛС «Дон-2П». В настоящее время с боевого дежурства снята.
На Западе РЛС «Дунай-3М» получила наименование «Doghouse» («Собачий дом» т.е.
Конура), а для «Дунай-3У» —«Cathouse» («Кошкин дом»).
В 1969г. в ряде организаций минрадиопрома СССР начались работы по проектированию
средств системы ПРО Москвы следующего поколения. В 1970г. в головной организации по
системе ПРО (НИИ радиоприборостроения) был проведен конкурсный отбор стрельбовой РЛС,
на роль разработчика которой претендовали три организации. Комиссия специалистов
выбрала РЛС, предложенную Радиотехническим институтом. Вскоре в стенах РТИ начались
работы по созданию этого суперлокатора, получившего шифр «Дон-2Н». Гл. конструктором
РЛС «Дон-2Н» был назначен В.Слока.
Работа над прототипом станции в дециметровом диапазоне (ЦСО-С) началась еще в
1963г. Скоро стало понятно, что дециметровая станция не сможет обеспечить высокую
точность обнаружения баллистических целей, и в начале 1964г. началась работа над
проектом приставки диапазона 7,5см. – прообразом будущего радиолокатора «Дон-2Н».
Вскоре стало ясно, что создавать нужно не приставку, а совершенно новый локатор. В
феврале 1966г. был предложен проект «Дон», включавший в себя разработку двух станций
– дециметровой и сантиметровой. В 1968г. был выпущен эскизный проект сантиметровой
станции «Дон» и с этого момента в РТИ были прекращены работы станциями дециметрового
диапазона. Работы продолжались над станциями метрового диапазона для СПРН и санти-
метрового для ПРО. В 1969г. в РТИ началась разработка аванпроекта РЛС «Дон-Н» для
перспективной системы противоракетной обороны Москвы. В 1973г. был разработан эскиз-
ный проект РЛС получившей к этому времени название «Дон-2Н». В 1974-76г. был разра-
ботан ряд дополнений к эскизному проекту с учетом новых требований к системе ПРО
Москвы. Прежде всего дополнения коснулись обработки сигналов которую предусматрива-
лось производить в цифровом виде.
К 1978г. на полигоне «А» в Сары-Шагане был развернут усеченный полигонный ва-
риант «Дон-2Н» - РЛС «Дон-2НП» которая представляла собой Г-образное здание размером
120х160м. и 37м. в высоту с зоной обзора 271 град. Ее успешные испытания позволили
начать строительство РЛС «Дон-2Н». В 1978г. под г. Софрино (вблизи г. Красноармейск
Московской обл.) в 45 км. от Москвы началось строительство станции. На строительство
На полигоне «А» (Сары-Шаган) был развернут полигонный вариант РЛС «Дунай-3У» -
«Дунай-3УП» (обозначение НАТО «Top Roost»), представлявший собой половину базовой
станции. РЛС вошла в состав полигонного комплекса ПРО «Алдан» в качестве РЛС даль-
него обнаружения целей. По результатам испытаний РЛС «Дунай-3УП» было принято реше-
ние о строительстве РЛС «Дунай-3У» вблизи г.Чехов на юге Московской обл. (Чехов-7).
В октябре 1973г. передатчик станции впервые заработал на излучение. В июле 1974г.
начались заводские испытания, а в 1975г. РЛС «Дунай-3У» была состыкована с объектами
системы ПРО А-35. В 1978г. РЛС введена в строй вместе с принятием на вооружение сис-
темы А-35М.
При разработке и создании станции был учтён опыт конструирования и эксплуатации
станции «Дунай-3М», а также применены новые достижения в области электроники. Это
позволило повысить дальность и точность действия станции, надежность её работы. Кон-
структивно комплекс схож с системой «Дунай-3М». Внешними различиями стали измененная
конструкция антенн (иная конструкция формирующей линзы ФАР) и их расположение (в от-
личие от совмещённых и направленных строго противоположно антенн «Дунай-3М», на
новой станции они разнесены примерно на 150м. и повернуты на несколько градусов).
Новая и более компактная аппаратура и оборудование позволили существенно сократить
необходимые объемы технологических помещений. Управление РЛС и обработка информации
осуществляется автоматически высокопроизводительной вычислительной системой с трой-
ным резервированием. РЛС обнаруживает с высокой вероятностью 90% всех составляющих
сложных баллистических целей на расстоянии не менее 2500км. РЛС может сопровождать
одновременно не менее 30 сложных баллистических целей. В 1984г. после поведенной
модернизации РЛС «Дунай-3У» могла обнаруживать ракеты «Першинг-2» через 2-3 минуты
после их старта. Некоторое время РЛС «Дунай-3У» работала в составе системы ПРО А-135
с РЛС «Дон-2П». В настоящее время с боевого дежурства снята.
На Западе РЛС «Дунай-3М» получила наименование «Doghouse» («Собачий дом» т.е.
Конура), а для «Дунай-3У» —«Cathouse» («Кошкин дом»).
В 1969г. в ряде организаций минрадиопрома СССР начались работы по проектированию
средств системы ПРО Москвы следующего поколения. В 1970г. в головной организации по
системе ПРО (НИИ радиоприборостроения) был проведен конкурсный отбор стрельбовой РЛС,
на роль разработчика которой претендовали три организации. Комиссия специалистов
выбрала РЛС, предложенную Радиотехническим институтом. Вскоре в стенах РТИ начались
работы по созданию этого суперлокатора, получившего шифр «Дон-2Н». Гл. конструктором
РЛС «Дон-2Н» был назначен В.Слока.
Работа над прототипом станции в дециметровом диапазоне (ЦСО-С) началась еще в
1963г. Скоро стало понятно, что дециметровая станция не сможет обеспечить высокую
точность обнаружения баллистических целей, и в начале 1964г. началась работа над
проектом приставки диапазона 7,5см. – прообразом будущего радиолокатора «Дон-2Н».
Вскоре стало ясно, что создавать нужно не приставку, а совершенно новый локатор. В
феврале 1966г. был предложен проект «Дон», включавший в себя разработку двух станций
– дециметровой и сантиметровой. В 1968г. был выпущен эскизный проект сантиметровой
станции «Дон» и с этого момента в РТИ были прекращены работы станциями дециметрового
диапазона. Работы продолжались над станциями метрового диапазона для СПРН и санти-
метрового для ПРО. В 1969г. в РТИ началась разработка аванпроекта РЛС «Дон-Н» для
перспективной системы противоракетной обороны Москвы. В 1973г. был разработан эскиз-
ный проект РЛС получившей к этому времени название «Дон-2Н». В 1974-76г. был разра-
ботан ряд дополнений к эскизному проекту с учетом новых требований к системе ПРО
Москвы. Прежде всего дополнения коснулись обработки сигналов которую предусматрива-
лось производить в цифровом виде.
К 1978г. на полигоне «А» в Сары-Шагане был развернут усеченный полигонный ва-
риант «Дон-2Н» - РЛС «Дон-2НП» которая представляла собой Г-образное здание размером
120х160м. и 37м. в высоту с зоной обзора 271 град. Ее успешные испытания позволили
начать строительство РЛС «Дон-2Н». В 1978г. под г. Софрино (вблизи г. Красноармейск
Московской обл.) в 45 км. от Москвы началось строительство станции. На строительство
ушло 32 тыс.т. металла, 50 тыс.т. бетона. К тысячам
помещений было проложено 20 (по другим данным 12)
тыс. км. кабеля. В 1989г. станция была принята на
вооружение. В 1996г. после проведенных испытаний
многофункциональная РЛС «Дон-2Н» стрельбового комп-
лекса ПРО г. Москвы была поставлена на боевое дежур-
ство. Данные полученные РЛС «Дон-2Н» используются
в системах ПРН и ККП. |  |
Многофункциональная РЛС сантиметрового диапазона «Дон-2Н» (в классификации НАТО
«Pill Box») предназначена для обнаружения до 100 баллистических целей на высоте до
40000км, их сопровождения, определения координат и наведения нескольких десятков
противоракет. Здание станции представляет собой правильную четырехугольную усеченную
пирамиду с длиной стороны у земли - 144м. по кровле - 100м. высотой 33,6м. Сооруже-
ние уходит под землю на глубину около 6м. На всех четырех боковых поверхностях соо-
ружения расположены фазированные антенные решетки (ФАР) сопровождения целей и проти-
воракет (круглые диаметром 16м.) и квадратные (10.4х10.4м.) ФАР передачи команд наве-
дения. «Дон-2Н» обеспечивает одновременный обзор всей верхней полусферы. Она отлича-
ется высокой помехозащищенностью, модульностью построения и высокой степенью автома-
тизации. РЛС построена таким образом, чтобы в случае ракетной атаки она могла сущес-
твовать автономно. Все ее системы дублированы, поэтому замена элементов, узлов, аг-
регатов оборудования может производиться без отключений. В мирной обстановке РЛС
«Дон-2Н» работает в режиме малой излучаемой мощности. Перевод станции в более актив-
ный режим осуществляется в случае необходимости. Вокруг РЛС на несколько километров
расположены экраны биологической защиты.
Уникальные возможности МРЛС «Дон-2Н» были наглядно продемонстрированы результа-
тами работы в международном эксперименте по обнаружению малоразмерных космических
объектов, проводимом по программе «ОДЕРАКС», в ходе которого с КК «Шатл» в открытый
космос были выброшены микроспутники - металлические шары диаметром 5,10 и 15см. МРЛС
«Дон-2Н» единственная из всех, привлекаемых в мире радиолокационных средств, смогла
обнаружить шарики диаметром 5см.
Наверх
|
